Modeling
Let's create a model on irteus expansion.
Geometrical model (bodyset)
bodyset is the lowest class able to gather multiple body instances into a single object.
Using this, the object described at geo_coding can be rewritten as follows.
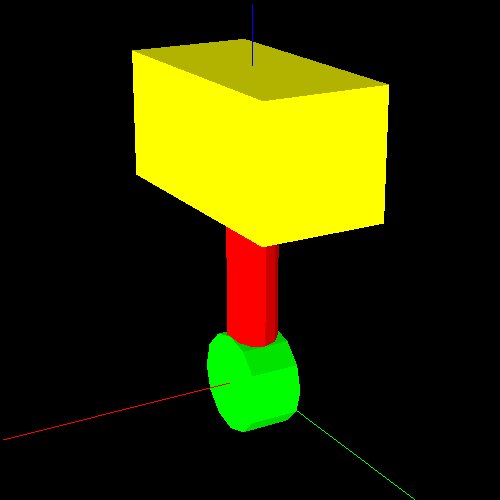
(setq *stick* (make-cylinder 10 100))
(send *stick* :set-color :red)
(setq *body* (make-cube 50 100 50))
(send *body* :translate (float-vector 0 0 100))
(send *body* :set-color :yellow)
(send *stick* :assoc *body*)
(setq *hammer*
(instance bodyset :init (make-cascoords)
:bodies (list *stick* *body*)))
(objects (list *hammer*))
Multiple link model (cascaded-link)
cascaded-link is the base for describing a multiple link model.
In the samplerobot example (refer robot_coding), objects given by (send *sr* :rarm) are of type cascaded-link.
cascaded-link adds joint angle information from joint class to the link information from bodyset-link class.
bodyset-link
bodyset-link is the lowest class able to describe multiple link structures with joints.
Since it is a child of bodyset class, it can be created the same way.
joint
joint is the lowest class able to represent joints, as the name points out.
Main types are rotational-joint and linear-joint.
During :init, it is possible to join links by setting :parent-link and :child-link.
Please note that the reference is the child-link coordinates.
Creating multiple link models
Create a class inheriting cascaded-link and model each link.
At initialization (:init), the following steps are taken.
- create a
bodyset-linkobjects - create
jointobjects betweenbodyset-linkinstances :assoclinks in order, starting fromselfand the root link- assign the list of
bodyset-linkobjects to the member variablelinks - assign the list of
jointobjects to the member variablejoint-list - at last, call
:init-ending
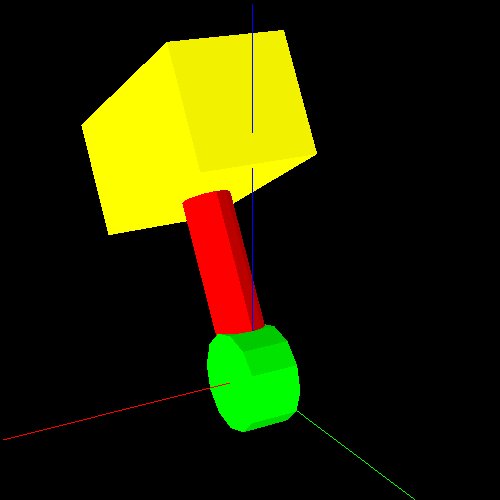
For example, let's create a hand that moves the previously created hammer.
(defclass hammer-hand
:super cascaded-link
:slots (hammer hand j0))
(defmethod hammer-hand
(:init
(&rest args)
(send-super* :init args)
(let (hammer-stick hammer-body hammer-stick2 hand-co)
;; create bodyset-links
(setq hammer-stick (make-cylinder 10 100))
(send hammer-stick :set-color :red)
(setq hammer-body (make-cube 50 100 50))
(send hammer-body :translate (float-vector 0 0 100))
(send hammer-body :set-color :yellow)
(send hammer-stick :assoc hammer-body)
(setq hammer
(instance bodyset-link :init (make-cascoords)
:bodies (list hammer-stick hammer-body)))
(setq hammer-stinck2 (make-cylinder 20 20))
(send hammer-stick2 :set-color :green)
(send hammer-stick2 :rotate (deg2rad 90) :y)
(send hammer-stick2 :translate (float-vector 0 0 -10))
(setq hand
(instance bodyset-link :init (make-cascoords)
:bodies (list hammer-stick2)))
;; create joints
(setq j0
(instance rotational-joint :init
:parent-link hand
:child-link hammer
:axis :x))
;; :assoc from base
(send self :assoc hand)
(send hand :assoc hammer)
;; links and joint-list are declared as cascaded-link
(setq links (list hand hammer))
(setq joint-list (list j0))
;; do not forget!
(send self :init-ending)
)
self)
;; joint accessor method
(:hand (&rest args) (forward-message-to j0 args))
)
(setq *hammer-hand*
(instance hammer-hand :init))
(objects (list *hammer-hand*))
Joint angle can be set with the following.
(send *hammer-hand* :hand :joint-angle 30)
robot-model class
Is is possible to define robots with multiple link models using robot-model class.
scene-model class
scene-model is the basic class for modeling the surroundings.
This is done by creating a class that inherits scene-model and giving objects models and spots to :objects.
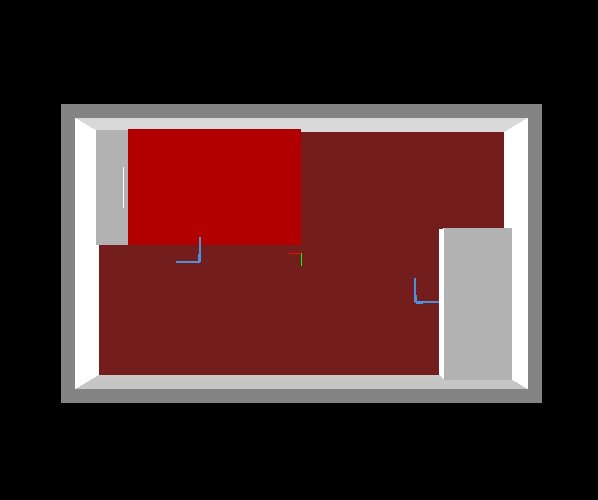
For example, a room model can be created with the following.
(defclass myroom-scene
:super scene-model
:slots ())
(defmethod myroom-scene
(:init
(&rest args &key (name "myroom"))
(let (objs wall0 wall1 wall2 wall3 floorpanel walls
table bed bed-base blaket pillow
tablespot bedspot)
(setq wall0 (make-cube 5300 150 2000)
wall1 (make-cube 150 3000 2000)
wall2 (make-cube 5300 150 2000)
wall3 (make-cube 150 3000 2000)
floorpanel (make-cube 5300 3300 100))
(send floorpanel :translate (float-vector 0 0 -50))
(send wall0 :translate (float-vector 0 1575 1000))
(send wall1 :translate (float-vector 2575 0 1000))
(send wall2 :translate (float-vector 0 -1575 1000))
(send wall3 :translate (float-vector -2575 0 1000))
(send floorpanel :set-color :brown)
(send wall0 :set-color :gray)
(send wall1 :set-color :gray)
(send wall2 :set-color :gray)
(send wall3 :set-color :gray)
(send floorpanel :assoc wall0)
(send floorpanel :assoc wall1)
(send floorpanel :assoc wall2)
(send floorpanel :assoc wall3)
(setq walls (instance bodyset :init (make-cascoords)
:name "wall"
:bodies (list floorpanel wall0 wall1 wall2 wall3)))
(setq table (make-cube 800 1800 700 :name "table"))
(send table :translate (float-vector -2100 600 350))
(send table :set-color :white)
(setq bedbase (make-cube 2500 1400 350)
blanket (make-cube 2100 1400 100)
pillow (make-cube 300 500 100))
(send bedbase :translate (float-vector 0 0 175))
(send blanket :translate (float-vector -200 0 400))
(send pillow :translate (float-vector 1050 0 400))
(send bedbase :set-color :white)
(send blanket :set-color :red)
(send pillow :set-color :white)
(send bedbase :assoc blanket)
(send bedbase :assoc pillow)
(setq bed (instance bodyset :init (make-cascoords)
:name "bed"
:bodies (list bedbase blanket pillow)))
(send bed :translate (float-vector 1250 -800 0))
(setq tablespot (make-cascoords :name "table-spot")
bedspot (make-cascoords :name "bed-spot"))
(send tablespot :translate (float-vector -1400 600 0))
(send tablespot :rotate pi :z)
(send bedspot :translate (float-vector 1250 100 0))
(send bedspot :rotate -pi/2 :z)
(setq objs (list walls table bed tablespot bedspot))
(send-super :init :name name :objects objs)
)
self)
)
(setq *myroom* (instance myroom-scene :init))
(objects (list *myroom*))
The greatest benefit of scene-model is that it is able to access objects and spots by name.
In this case:
(send *myroom* :object "bed")
gives the bed object, and
(send *myroom* :spot "bed-spot")
gives the spot near the bed.